Sensor Configuration
- Stereo Camera: Custom Underwater Stereo Camera
- Doppler Velocity Log: WaterLinked A50 DVL
- IMU: MICROSTRAIN 3DM-GX5-AHRS IMU
- Depth Sensor: Blue Robotics Bar 30 Pressure/Depth
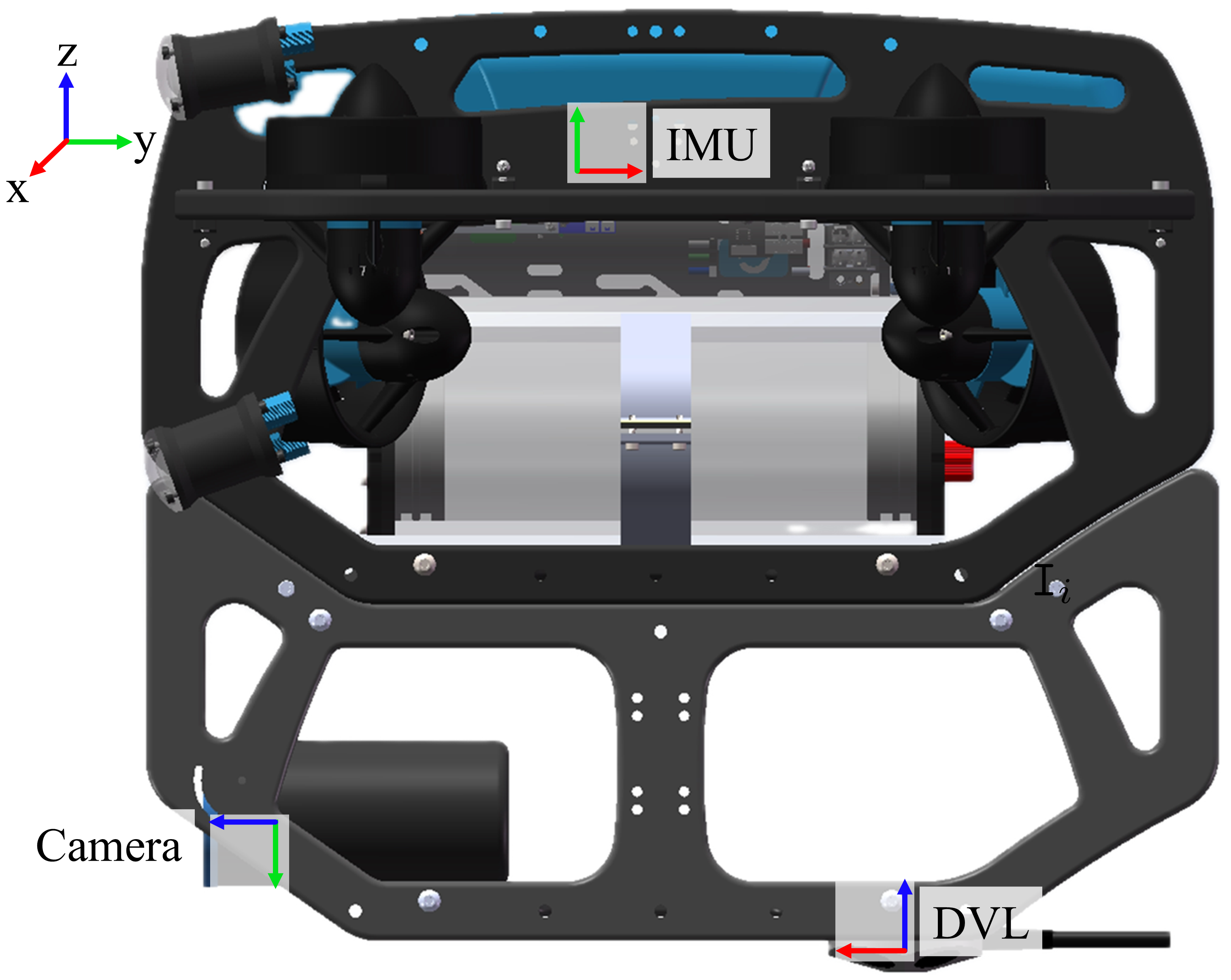
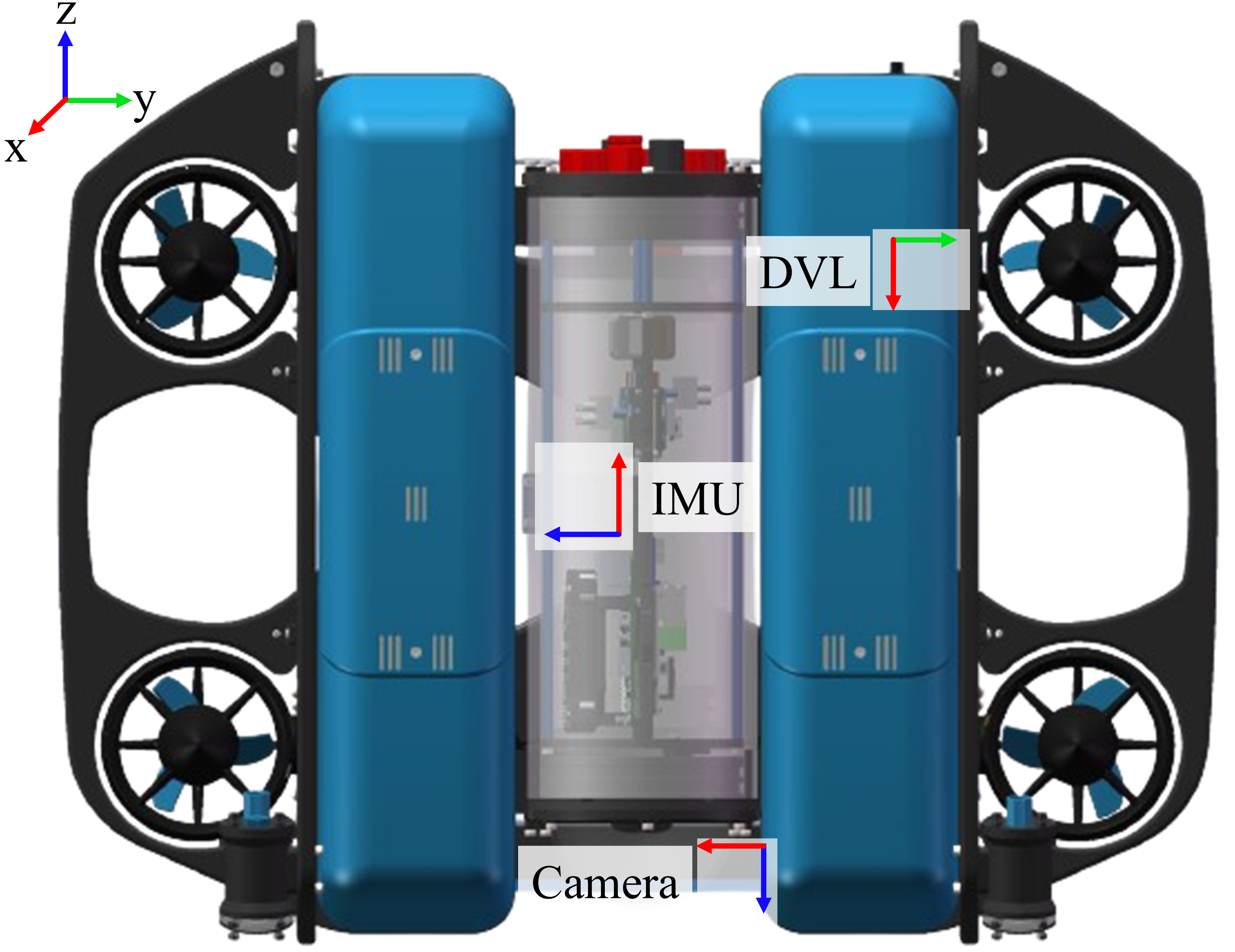
The sensor frames are defined as follows:
Note that the actual extrinsic parameters between the sensors may vary slightly due to the mounting process. Please refer to the provided parameter files for accurate extrinsic calibration.
Data Format
All data is provided by ROS bag and raw data associated with parameter YAML files.
ROS Bag
| Topic | Type | Description | HZ |
|---|---|---|---|
| /camera/left/ image_dehazed/compressed |
sensor_msgs/CompressedImage |
Left image from the stereo cameras. | 20 |
| /camera/right/ image_dehazed/compressed |
sensor_msgs/CompressedImage |
Right image from the stereo cameras. | 20 |
| /imu/data | sensor_msgs/Imu |
IMU data. | 333 |
| /dvl/data | waterlinked_a50_ros_driver/DVL |
DVL data. | 5 |
| /depth/data | nav_msgs/Odometry |
Depth data from pressure sensor. | 30 |
| /apriltag_slam/GT | nav_msgs/Odometry |
GT pose provided by AprilTag SLAM. | 20 |
| /apriltag_slam/GT_full | nav_msgs/Odometry |
Full ground truth pose fused by AprilTag SLAM and AQUA SLAM. | 2.5 |
| /aqua_slam/pose | nav_msgs/Odometry |
Pose estimate from AQUA SLAM. | 2.5 |
Please note that the /apriltag_slam/GT_full topic is not available in Structure_Easy, Medium and Hard sequences. Since /apriltag_slam/GT already provides high-accuracy full ground truth trajectories, the fusion with AQUA SLAM is not necessary for these sequences.
Raw Data
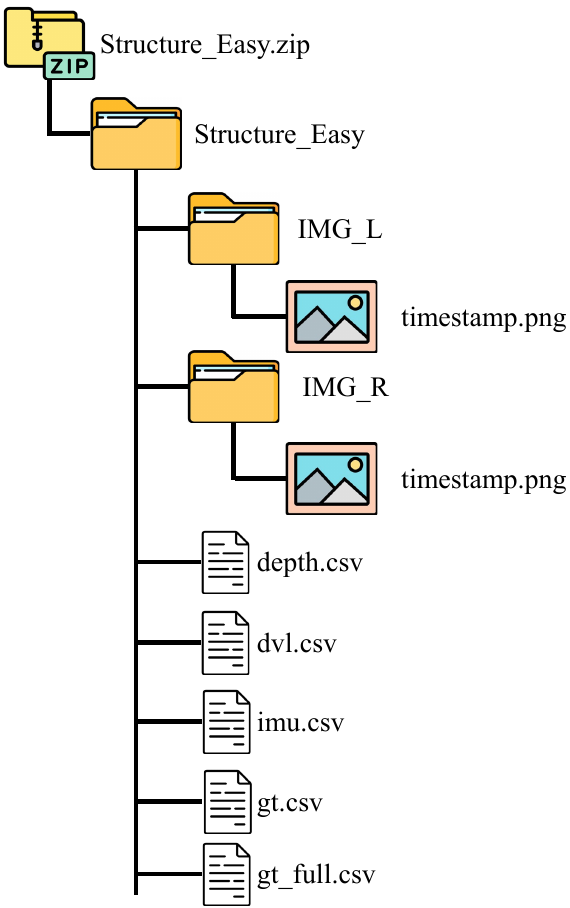
In addition to the ROS bag files, we provide a Raw Data Conversion Script to extract the raw data from the ROS bag.
The raw data includes the images from the stereo camera, the depth data from the pressure sensor, the DVL data, the IMU data, and the GT data. An example of the folder structure of Structure_Easy sequence is shown as follows:
Parameter file
The parameter files provide the camera’s intrinsic parameters and the extrinsic parameters between the sensors in YAML format.
Please note the extrinsic parameters may vary slightly for different sequences due to the mounting process. Please use the corresponding parameter files for different sequences.
#Camera Intrinsics
Camera.fx: 655.0
Camera.fy: 655.0
Camera.cx: 306.0
Camera.cy: 256.0
# stereo baseline times fx
Camera.bf: 78.89165891925023
# Sensor Extrinsic between IMU and Camera
T_imu_camera: !!opencv-matrix
rows: 4
cols: 4
dt: f
data: [ -0.0165, -0.0175, -0.9997, -0.211687435,
-0.0106, 0.9998, -0.0173, -0.097259169,
0.9998, 0.0103, -0.0167, -0.056238089,
0, 0, 0, 1 ]
# Sensor Extrinsic between DVL and Camera
T_dvl_camera: !!opencv-matrix
rows: 4
cols: 4
dt: f
data: [ -0.0030, 0.0292, 0.9996, 0.132344740,
0.9995, 0.0328, 0.0021, 0.032085643,
-0.0327, 0.9990, -0.0293, -0.240100175,
0, 0, 0, 1 ]