Tank Dataset
An Underwater Multi-Sensor Dataset for SLAM Evaluation
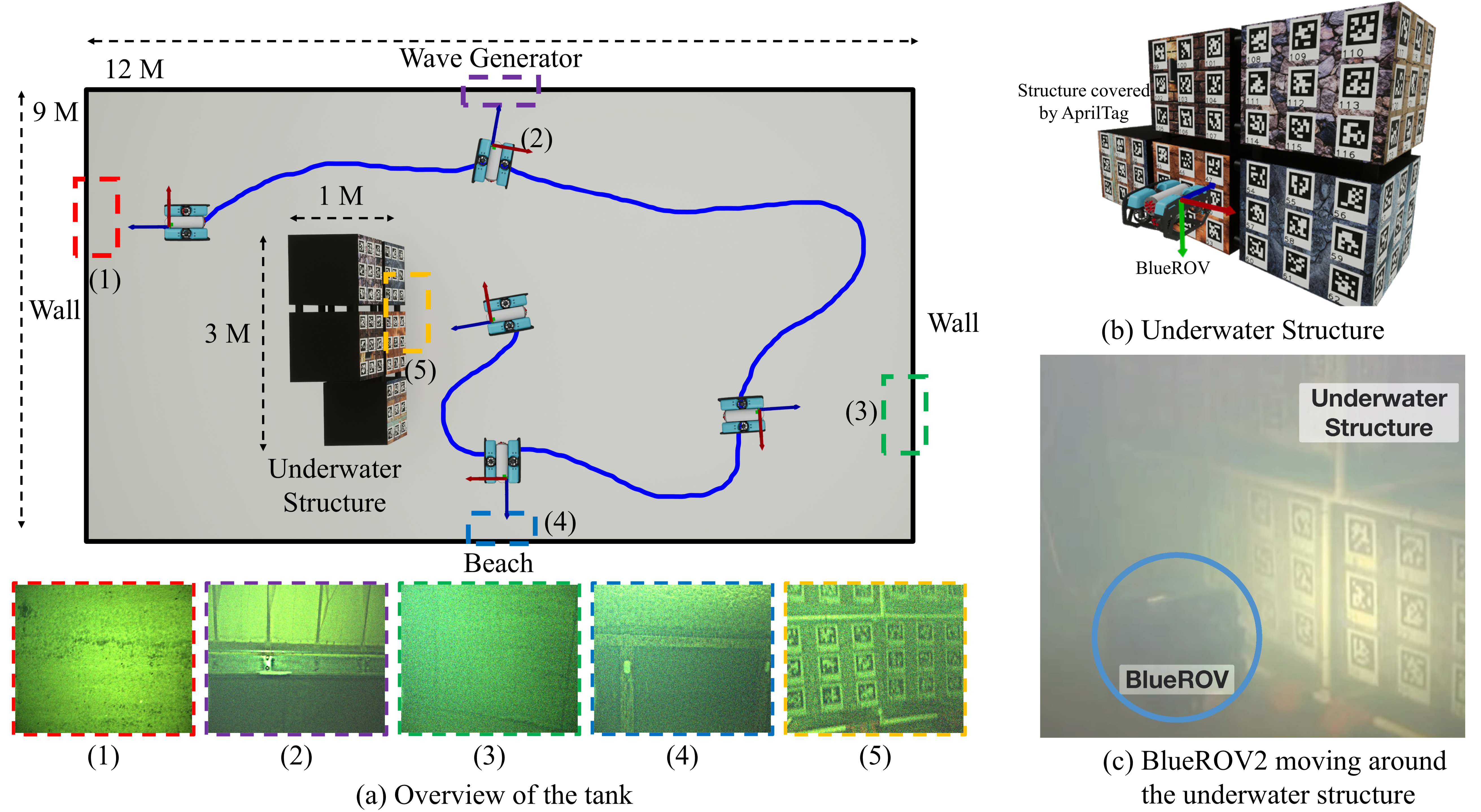
The Tank dataset is an underwater SLAM evaluation dataset that includes data from stereo cameras, an IMU, a DVL, a depth pressure sensor, and ground truth (GT) poses. The Tank dataset offers sequences of varying difficulty, representing diverse underwater conditions. The eight sequences were collected in a water tank, covering different areas including a textureless wall ((1) and (3) in the figure), a wave generator ((2) in the figure), a beach ((4) in the figure), and an underwater structure covered with AprilTag markers ((5), (b), and (c) in the figure). Additionally, a fiducial-marker-based SLAM system is employed to provide high-accuracy 6-DoF pose ground truth data, enabling rigorous evaluation and comparison of underwater SLAM algorithms.
Citation
Please cite our paper, if you use our data for your research:
@article{xu2025tank,
title={Tank dataset: An underwater multi-sensor dataset for SLAM evaluation},
author={Xu, Shida and Scharff Willners, Jonatan and Roe, Joshua and Katagiri, Sean and Luczynski, Tomasz and Petillot, Yvan and Wang, Sen},
journal={The International Journal of Robotics Research},
pages={02783649251364904},
year={2025},
publisher={SAGE Publications Sage UK: London, England}
}
License
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Download
You can download the dataset on our Download page.